Problem 6.10#
In this problem we will compare an explicit and implicit timescheme for the heat equation,
First let us look at the explicit scheme.
Explicit scheme#
Using the forward difference approximation in time and a centred finite difference for the spatial gradient temperature, \(\theta\), at the next timestep \(n+1\) may be approximated as
Let us first set up the domain and define a function for the initial condition:
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.colors as mcolors
# Since the dx is 1, lets initialise x using arange
x = np.arange(0, 101)
dx = 1
# Initialise theta array of the same length
N = len(x)
theta = np.zeros(N)
# Set alpha value
alpha = 1.0
Initial condition:#
Below we define a function to set the initial condition. This is a delta-function-like spike.
def set_init_condition(x, theta):
theta[:] = 0
theta[x==50] = 1
return theta
# Set the initial condition and plot it
theta = set_init_condition(x, theta)
fig, ax = plt.subplots()
ax.plot(x, theta, 'k')
ax.set_xlim([0,100])
ax.set_title('Initial condition');
Timestepping:#
Below we define the function that solves for \(\theta^{n+1}\) based on \(\theta^{n}\). We will impose boundary conditions that \(\theta^{n} = 0 \) for \(x = 0, L\).
def explicit_step_in_time(theta, alpha, dt, dx):
# theta = 1D array, current timestep n
# alpha = float, diffusivity
# dt = float, timestep
# dx = float, grid spacing
# Impose boundary conditions
theta[0] = 0
theta[-1] = 0
# Update values not at boundary
theta[1:-1] = theta[1:-1] + (alpha*dt/(dx*dx)) * (theta[2:] - 2*theta[1:-1] + theta[:-2])
return theta
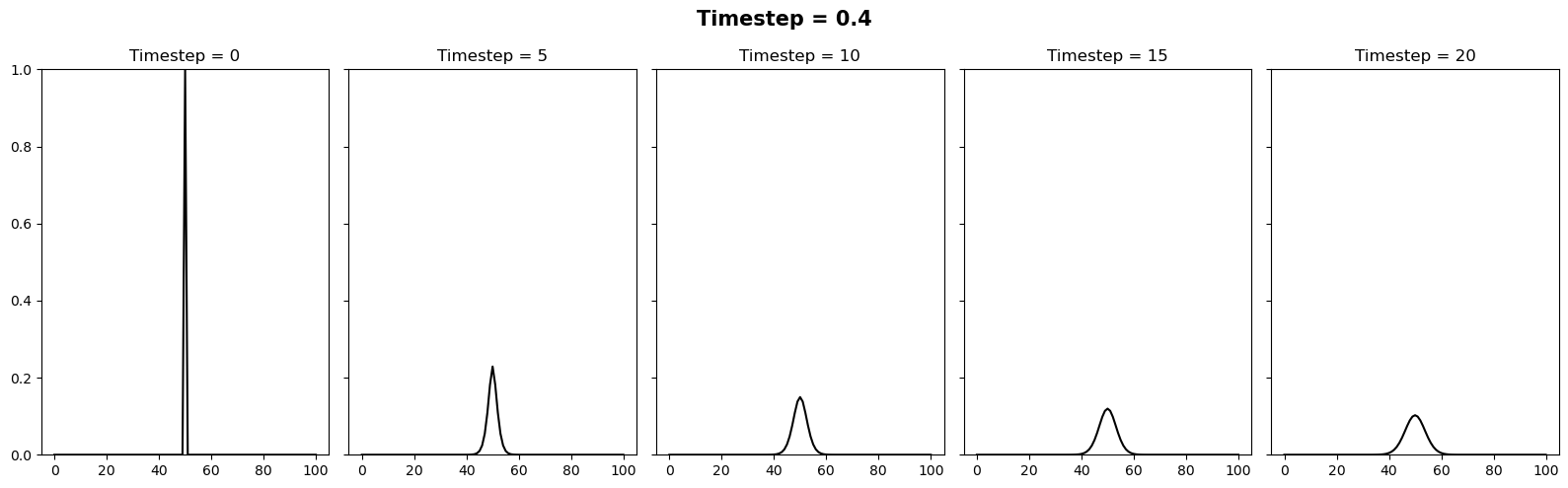
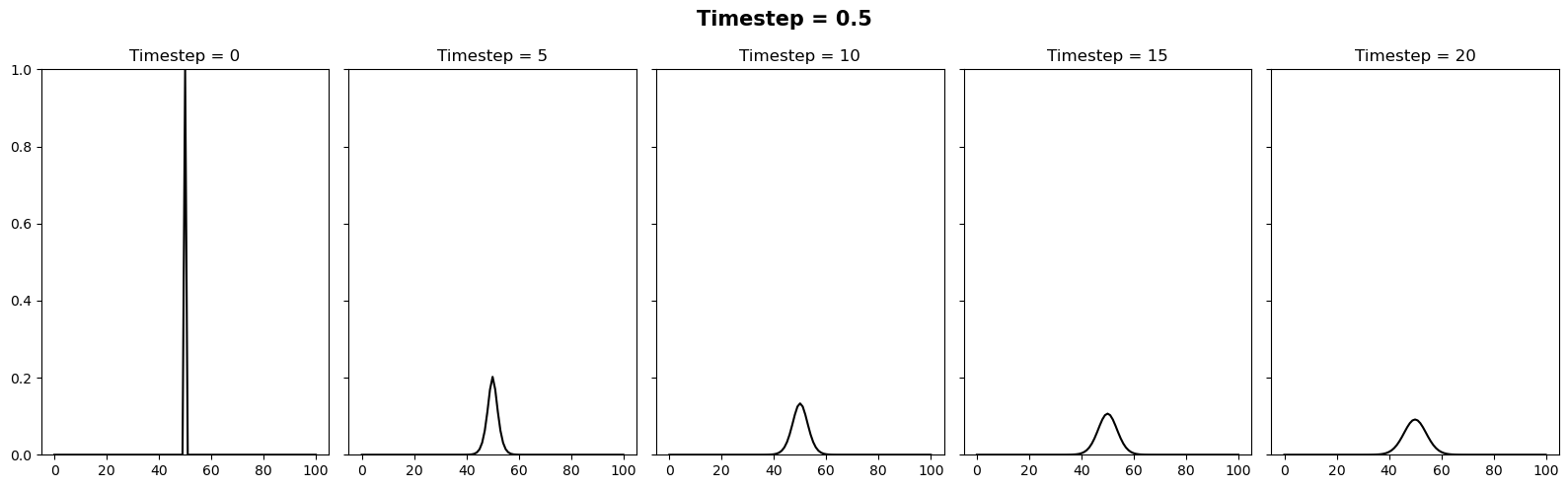
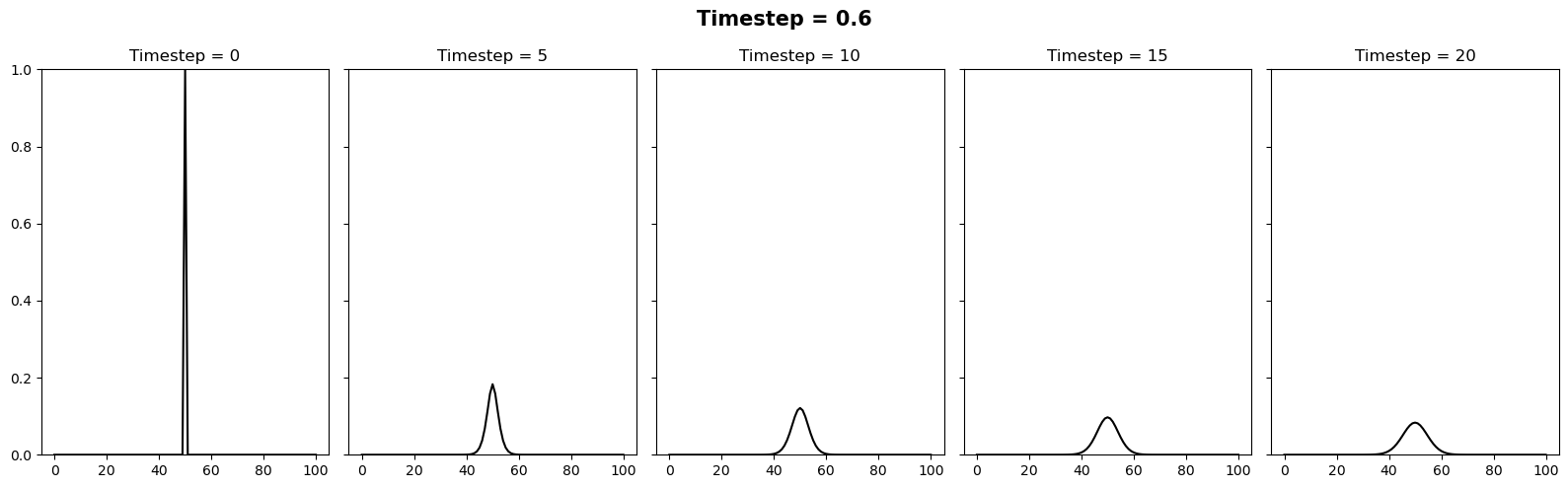
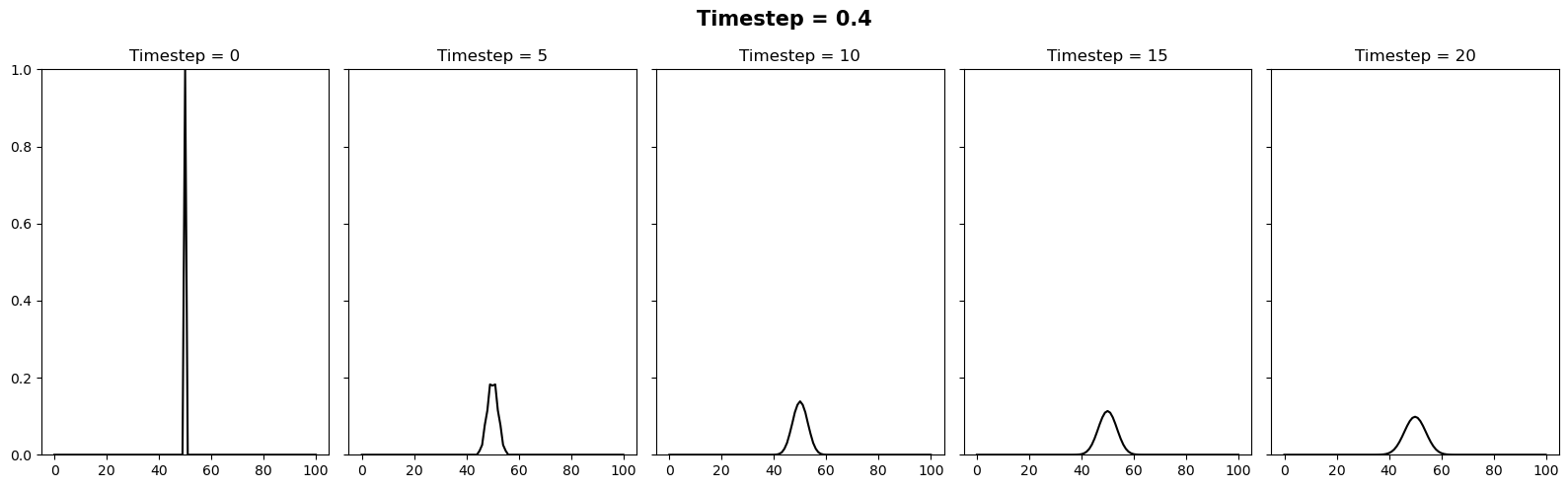
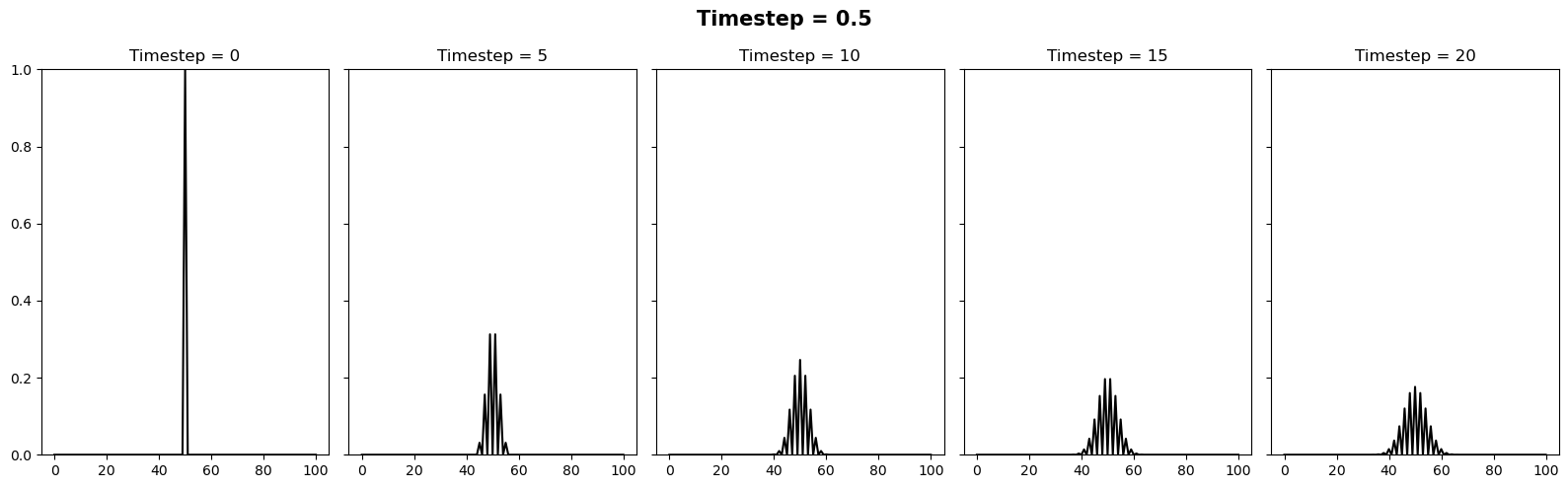
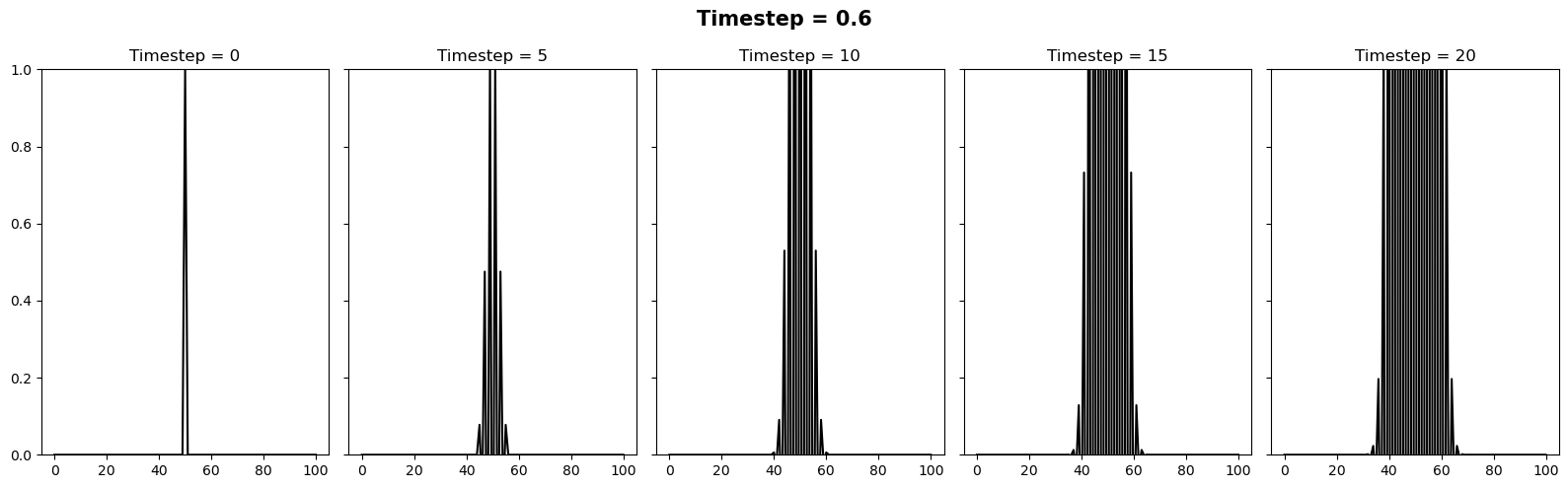
Investigating the stability#
We can vary the stability of this scheme by varying the value of \(k\) where \(\Delta t = \alpha (\Delta x)^2 / k\). It appears there is a slight typo in the question. It is supposed to be asking the reader to test how the stability changes when the timestep is between 0.4 and 0.6. We can relate these to \(k\) values of 10/4 and 10/6. Below we will plot 3 figures for different timesteps of 0.4, 0.5 and 0.6. In each plot we show the initial condition in grey, and the temperature at the current timestep in blue. We observe a system that is stable (\(\Delta t = 0.4\)), on the edge of stability (\(\Delta t = 0.5\)) and completely unstable (\(\Delta t = 0.6\)).
for k in [10/4, 10/5, 10/6]:
dt = alpha * (dx**2) / k
# Lets reimpose the boundary conidition to ensure it is
# imposed every time we run this notebook cell
theta = set_init_condition(x, theta)
# Setup 5 subplots
nplots = 5
fig, ax = plt.subplots(1,nplots, figsize=(16,5),
sharey=True, sharex=True)
fig.set_tight_layout(True)
fig.suptitle(f'Timestep = {dt}', fontsize=15, weight='bold')
# Loop through each timestep (i) and plot every
# 'plot_every'th timestep so that
# there are 5 plots
ntimesteps = 25
plot_every = int(ntimesteps/nplots)
ictr = 0
for i in range(ntimesteps):
if i%plot_every==0:
ax[ictr].plot(x, theta, 'k')
ax[ictr].set_title(f'Timestep = {i}')
ax[ictr].set_ylim([0,1])
ictr += 1
theta = explicit_step_in_time(theta, alpha, dt, dx)
Implicit scheme#
Using the forward difference approximation in time and a centred finite difference for the spatial gradient temperature, \(\theta\), at the next timestep \(n+1\) may be approximated as
where I am denoting \(\beta = \frac{\alpha \, \Delta t}{(\Delta x)^2}\) and \(\gamma = \left[ 1 + 2 \beta\, \right]\). This system of linear equations for each spatial point, \(j= 1, N\) may then be written as a matrix:
or in matrix form as
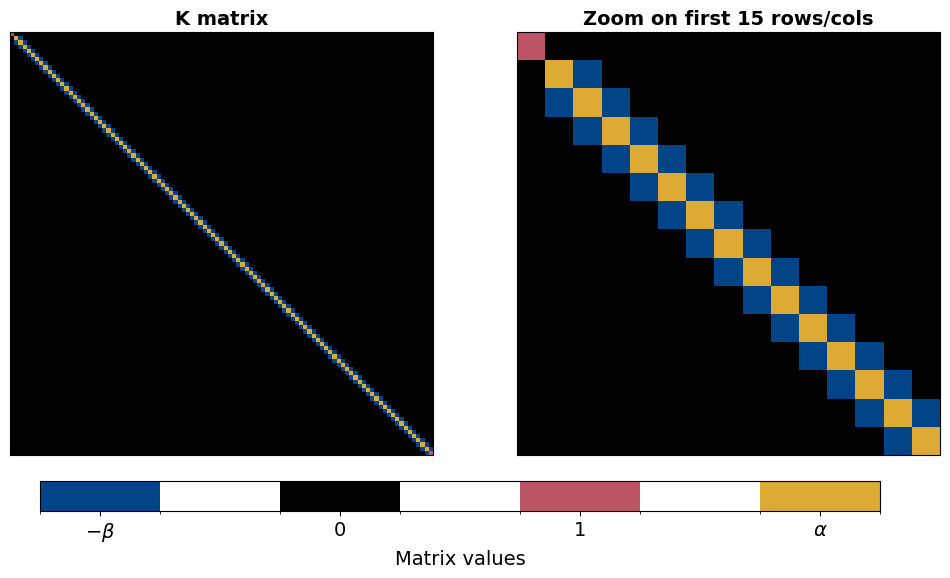
The structure of the matrix \(\mathbf{K}\) is sparse (mostly zeros) and tri-diagonal. Note that the values in the first and last rows ensure that
as per the Dirichlet boundary condition. As long as \(\mathbf{K}\) can be inverted, this solution may then be time-marched as
or in matrix form as
and since \(\mathbf{K}\) is time-independent, the inversion must be completed only once. In the code cell below, a function is written to build the \(\mathbf{K}\) matrix. Plotting this matrix, we then see the tridiagonal structure.
def build_K_mat(alpha, dt, dx, return_beta_gamma=False):
beta = alpha*dt/(dx**2)
gamma = 1 + 2*beta
# Build our matrix
K = np.zeros((N,N))
# Avoiding the first and last elements:
for i in range(1, N-1):
K[i,i] = gamma
K[i+1,i] = -beta
K[i,i+1] = -beta
K[0,0] = 1
K[-1,-1] = 1
if return_beta_gamma:
return -np.around(beta,3), np.around(gamma,3), K
else:
return K
Let us briefly investigate the structure of the stiffness matrix. We observe its tri-diagonal structure with variations at the first and last element imposing the boundary conditions.
Show code cell source
# In this case i have added an extra flag to return beta and gamma
# just for plotting the values on the image below with the correct
# colorbar
b, g, K = build_K_mat(alpha=0.5, dt=dt, dx=dt, return_beta_gamma=True)
# Create a discrete colourbar for plotting our matrix
# Colours from https://personal.sron.nl/~pault/ High Contrast scheme
cmap = mcolors.ListedColormap(['#004488', 'white', 'k', 'white', '#BB5566', 'white', '#DDAA33'])
bounds = [b-0.06,b+0.06, -0.05, 0.05, 0.95,1.05, g-0.1,g+0.1] # Boundaries for the colors
norm = mcolors.BoundaryNorm(bounds, cmap.N)
# Plot the matrix
fig, axes = plt.subplots(1,2, gridspec_kw={'width_ratios': [1, 1]}, figsize=(12,6))
axes[0].set_title('K matrix', weight='bold', fontsize=14)
axes[0].imshow(K, cmap=cmap, norm=norm);
# Plot a subset of the first n rows/cols of the matrix
n = 15
im = axes[1].imshow(K[:n, :n], cmap=cmap, norm=norm);
axes[1].set_title(f'Zoom on first {n} rows/cols', weight='bold', fontsize=14);
# Add some bells and whistles to the plot
for ax in axes:
ax.set_xticks([])
ax.set_yticks([])
cbar_ax = fig.add_axes([0.15, 0.05, 0.7, 0.05]) # [left, bottom, width, height]
cbar = plt.colorbar(im, cax=cbar_ax, orientation='horizontal')
cbar_ax.set_xticks([b, 0, 1, g])
cbar_ax.set_xticklabels([r"$-\beta$", "0", "1", r"$\alpha$"], fontsize=14)
cbar.set_label("Matrix values", fontsize=14);
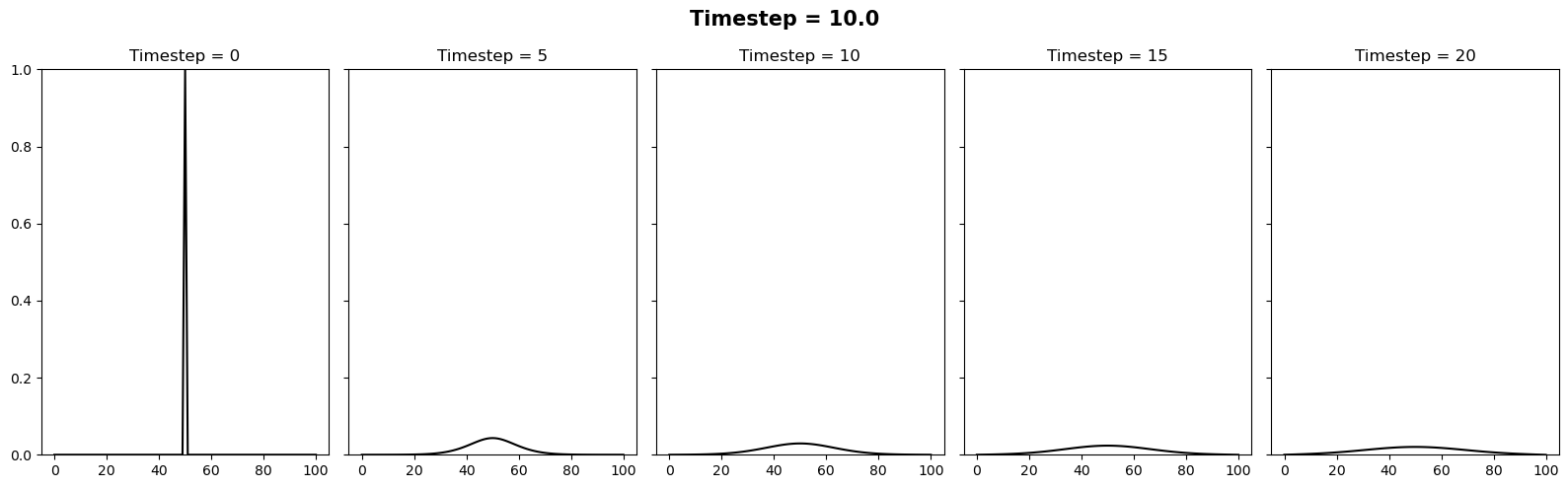
Solving with the Implicit method#
The code snippet below is identical to the code above apart from the following
It computes K for the chosen timestep and inverts it
The
explicit_step_in_timeis replaced with a line of code that simply computes the matrix calculation \(\mathbf{\Theta}^{n} = \mathbf{K}^{-1} \mathbf{\Theta}^{n-1} \)
In this case we will try the same timesteps as above, as well as \(\Delta t = 10\). Since this setup is unconditionally stable, all these timesteps provide a stable solution.
for k in [10/4, 10/5, 10/6, 0.1]:
dt = alpha * (dx**2) / k
# Compute the K matrix for this timestep:
K = build_K_mat(alpha, dt, dx)
Kinv = np.linalg.inv(K)
# Lets reimpose the boundary conidition to ensure it is
# imposed every time we run this notebook cell
theta = set_init_condition(x, theta)
# Setup 5 subplots
nplots = 5
fig, ax = plt.subplots(1,nplots, figsize=(16,5), sharey=True, sharex=True)
fig.set_tight_layout(True)
fig.suptitle(f'Timestep = {dt}', fontsize=15, weight='bold')
# Loop through each timestep (i) and plot every 'plot_every'th timestep so that
# there are 5 plots
ntimesteps = 25
plot_every = int(ntimesteps/nplots)
ictr = 0
for i in range(ntimesteps):
if i%plot_every==0:
ax[ictr].plot(x, theta, 'k')
ax[ictr].set_title(f'Timestep = {i}')
ax[ictr].set_ylim([0,1])
ictr += 1
theta = np.matmul(Kinv, theta)